-

-

本文設計了一款降壓型LED恒流驅動芯片的滯環控制電路。該芯片采用高邊電流檢測方案,運用滯環電流控制方法對驅動電流進行滯環控制,從而獲得恒定的平均驅動電流。設計采用簡單的設計理念實現恒流驅動,不需要復雜的電路分析,能實現精確的電流控制,且自身具有穩定性。 [詳情]
-

當智能電網遇上了“超級偵探”會是一個怎樣的狀態?“超級偵探”是如何誕生的?“超級偵探”到底是如何發揮能力的,并有著哪些驚奇的舉措? [詳情]
-
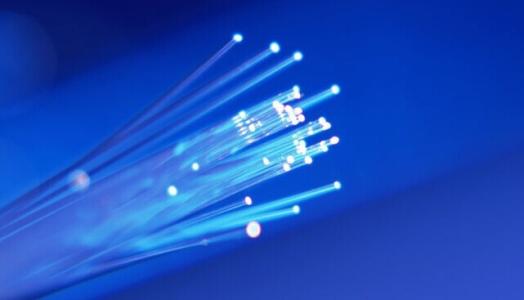
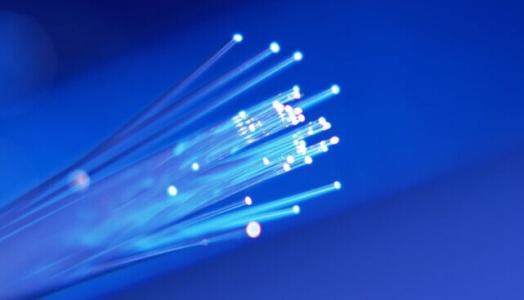
光速是人們無法企及的夢想,但是光,卻是人們可以駕馭的利器。英國愛丁堡大學工程學院的哈斯教授預言:燈泡可能在不久后被用于無線網絡傳輸。 [詳情]
-

-

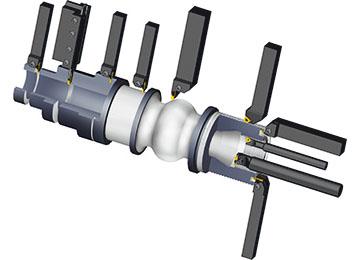
大多數攝影鏡頭都是由多片球面鏡組合而成,這種鏡頭只能靠設計中對鏡片曲率的不斷調試并且整合不同鏡片的相對位置來獲得接近理想的成像效果。 [詳情]
-

2000年以來,我國電網峰谷差逐年增大,多數電網的高峰負荷增長幅度在10%左右甚至更高,而低谷負荷的增長幅度則維持在5%甚至更低。峰谷差的增加幅度大于負荷的增長幅度,在電網中引入儲能系統是實現電網調峰的迫切需求。 [詳情]
-

本文探討提供發光二極體(LED)調光的方法,分析LED調光對其長期性能及所發射出光的色彩穩定性之影響,并特別探討如何結合使用線性恒流穩流器(CCR)及數位電晶體來提供脈沖寬度調變(PWM)調光。 [詳情]
-

工業機器人關節主要是采用交流伺服系統進行控制,本研究將技術成熟、編程方便、可靠性高、體積小的SIEMENSS-200可編程控制器,應用于可控環流可逆調系統,研制出機器人關節直流伺服系統,用以對工業機器人關節進行伺服控制。 [詳情]
-
碳纖維復合材料的組成,尤其是碳纖維的高熱傳導率,使得傳統技術很難加工它們。 [詳情]
-
三維光纖激光切割機是由專用光纖激光切割頭、高精度電容式跟蹤系統、光纖激光器以及工業機器人系統對不同厚度的金屬板材進行多角度、多方位柔性切割的先進的激光切割設備。 [詳情]
-
本文探討了采用激光熔覆技術提高模具性能、延長模具壽命的可行性。 [詳情]
-
萬能試驗機夾具常見問題主要表現為試樣夾持部分打滑或試驗機某些力值傳遞環節間存在較大的間隙等因素,它在舊機器上出現的概率較大。 [詳情]
-

在IEEE 802.3ba規范2010年被批準后,基于標準的40/100G以太網交換機和路由器已開始逐步在企業網絡中部署。本文為網絡架構師向40/100G以太網遷移提供的詳細指導。 [詳情]
-

激光切割技術廣泛應用于金屬和非金屬材料的加工中,可大大減少加工時間,降低加工成本,提高工件質量。 [詳情]



